HI03 - Compare hydraulics, pneumatics, electrical

This module will look at some of the key differences between hydraulic, pneumatic and electrical drive systems. This includes:
- Typical Power Ranges
- Typical Sizes
- Duty Benefits
- Installation Flexibility
HI04 - Basics of hydraulic components
This module will explain what the basic components are, that make up a simple hydraulic circuit. This includes:
- Hydraulic Pumps
- Hydraulic Valves
- Hydraulic Actuators
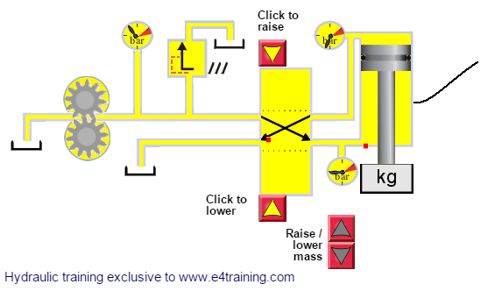
HI05 - Basic hydraulic circuits
This module will explain the layout and function of a basic hydraulic circuit.
HS01 - How to operate hydraulic equipment safely

This module will cover some basic issues for how to operate hydraulic equipments safely. This includes:
- System indentification
- Documentation and training
- Risk assessments
- Key operating and risk points
HI06 - Example tractor hydraulic circuit

Showing a sample tractor hydraulic circuit and the functions it drives.
Introducing the basic layout of the main components in a typical hydraulic circuit.
HI01 - Examples of working hydraulic equipment
HI01 - What fluid power is used for
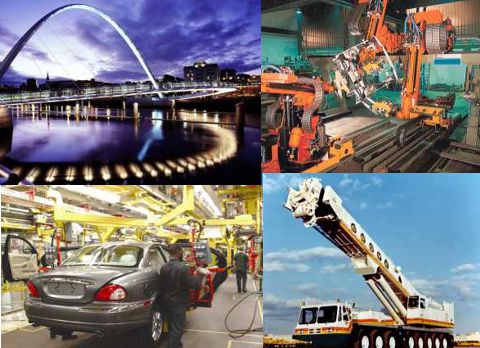
HI02 - Where hydraulics is used

Understand some typical applications where hydraulics is used.
Things You Will Learn
This module will introduce you to hydraulic equipment with examples of where it is used. It will explain the types of component that are used and how they work together in a circuit.
Things you will learn
This module will introduce you to hydraulic equipment with examples of where it is used. We will explain the type of components that are used and how they work together in a circuit.
Individual sections will explain:
1. Understand some typical applications where hydraulics is used.
2. More examples of where fluid power is used.
3. What the basic components are that make up a hydraulic circuit.
4. Explaining the layout function of a small hydraulic circuit.
5. Showing a sample tractor hydraulic circuit and the functions it drives.
Relevant Sectors
This module does not cover or apply to any specific equipment or industry. It is intended to lay down the basic building blocks for understanding how hydraulics works and what components are used in both mobile or industrial applications.
Target Audience
People who hope to work in any positions in the hydraulics industry and would like to know what the excitement is all about.
Previous Knowledge Required
None
Further Reading
Look around you for equipment that uses hydraulics.
Progress to our Newbie Training.